Key Takeaways
Metal Injection Molding (MIM) revolutionizes micro-planetary gearbox manufacturing for robotic actuators by combining precision, efficiency, and cost-effectiveness in ways traditional machining cannot match.
• MIM achieves exceptional precision with ±0.01mm tolerances and 98%+ material density, enabling reliable torque transmission in compact robotic actuator designs.
• Complex internal gear geometries are produced in single molding operations, eliminating multiple machining steps and reducing manufacturing costs significantly.
• Superior surface finishes of Ra ≤0.2µm reduce friction by 30%, improving transmission efficiency and extending operational lifespan in robotic applications.
• Material versatility supports diverse applications – from corrosion-resistant 17-4PH stainless steel for harsh environments to lightweight titanium alloys for aerospace robotics.
• Cost-effective mass production capabilities make MIM ideal for high-volume gear manufacturing across industrial robots, AMRs, collaborative robots, and medical surgical instruments.
The technology’s ability to produce millions of consistent, high-quality micro gears monthly positions MIM as the manufacturing backbone for the rapidly expanding robotics industry, where precision and reliability are non-negotiable requirements.
What is MIM Technology and How Does It Work
MIM Acronym Technology Explained
Metal Injection Molding merges the design flexibility of plastic injection molding with the strength and integrity of powder metallurgy to produce complex metal components. The process uses fine metal powders, typically less than 20 micrometers in diameter, custom formulated with binder materials to create a feedstock. This combination allows manufacturers to produce mechanical properties nearly equivalent to wrought materials while maintaining net-shape process capabilities with good dimensional tolerance control.
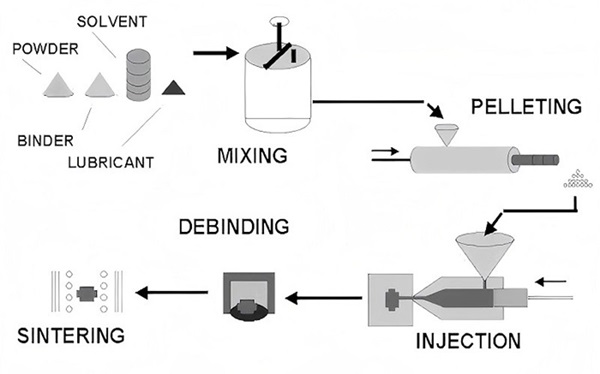
Feedstock Preparation and Injection Molding
The MIM process begins with feedstock preparation. Fine metal powder is mixed with thermoplastic and wax binders in precise amounts. Binders typically comprise 40% by volume of the feedstock. The mass is heated to ensure uniform distribution of metal particles coated with the binder. It is then cooled and granulated into free-flowing pellets that feed into injection molding machines.
The feedstock pellets enter a heated barrel during injection molding. The reciprocating screw brings the material to a toothpaste-like consistency. High pressure forces the material into a two-part mold through gates and forms the part’s geometry. The part ejects from the mold as a “green” part once cooled, approximately 20% larger in all dimensions than the finished component.
Debinding and Sintering Process
The green part undergoes debinding after molding to remove most binder materials. This process occurs through thermal or solvent methods and leaves behind a secondary binder to maintain the part’s size and geometry. The result is a semi-porous “brown” part ready for sintering.
Sintering heats the brown part to approximately 85% of the metal’s melting temperature in a controlled atmosphere furnace. Temperatures reach 1,350 to 1,400 degrees Celsius for stainless steel parts. Remaining binder evaporates during this phase, metal particles fuse, and the part shrinks typically 15-20% isotropically to its design dimensions. The process achieves 96-99% of theoretical density when performed in controlled atmospheres.
Why MIM Suits Micro-Planetary Gearbox Production
MIM technology excels at producing micro-planetary gearboxes because it creates complex shapes with internal gear features in a single step without extensive post-processing. The process handles intricate geometries and thin walls that traditional machining can’t achieve cost-effectively. Parts under 100 grams benefit most from MIM, with exceptional results for components under 40 grams. Knowing how to maintain tight tolerances of ±0.3% while achieving high material density makes MIM especially good for precision gear applications requiring reliable torque transmission.
Design and Manufacturing Advantages of MIM for Micro-Planetary Gearboxes

Complex Geometry Creation with Internal Gear Features
MIM technology produces planetary gear components with geometries difficult to achieve through conventional machining. Internal ring gears, helical teeth configurations, and multi-step gear assemblies form in a single molding operation. Worm gears used in locking mechanisms demonstrate this capability. Helical teeth geometry integrates with adjacent cylindrical shaft features without requiring secondary operations. Three interlocking slides in injection molds produce complex tooth profiles that would otherwise demand specialized cutting tools and multiple setup operations.
Dimensional Precision: ±0.01mm Tolerances for Planetary Gear Systems
Powder metallurgy parts achieve radial tolerances within ±0.01mm and meet strict quality standards for gear applications. Dimensional accuracy ranges from IT8-IT9 after sintering. Sizing processes improve precision to IT6-IT7 levels. These tolerances work well for planetary gear systems where precise tooth engagement determines transmission efficiency. Form and orientation tolerances maintain roundness within ±0.03mm and concentricity within ±0.05mm.
Cost-Effective Mass Production of Multi-Gear Sets
MIM supports high-volume gear production with consistent quality across millions of units monthly. Mass production of micro gears with modules of 0.5 or less becomes possible with this technology. Internal and helical configurations that machining can’t produce economically are now feasible. Single cavity molds eliminate the need for multiple processing steps and reduce labor costs compared to traditional gear cutting methods.
Material Density Above 98% for High Torque Transmission
Sintered components reach material densities exceeding 98% of theoretical solid density. This high consolidation level provides mechanical properties comparable to wrought materials and supports reliable torque transmission in planetary gear systems. Density influences contact stress capacity and bending strength. The 98% threshold is critical for load-bearing applications.
Superior Surface Finish: Ra ≤0.2µm for Low Friction Operation
MIM gears achieve surface roughness values of Ra ≤0.2µm through controlled finishing processes. Drag finishing techniques reduce roughness from ground surfaces to Ra 0.1µm within 5-8 minute cycles. These smooth surfaces create full hydrodynamic lubrication during operation. Friction coefficients drop by up to 30 percent compared to conventionally ground gears. Lower friction translates to reduced heat generation and improved transmission efficiency in robotic actuator applications.
Material Selection and Properties for Robotic Actuator Gearboxes
Material selection determines the performance envelope of planetary gearboxes in robotic actuators. MIM technology accommodates multiple alloy families. Each is optimized for specific operational demands.
Stainless Steel 17-4PH for Corrosion-Resistant Actuators
Stainless steel 17-4PH offers precipitation-hardening capabilities that balance corrosion resistance with mechanical strength. This martensitic alloy contains approximately 17% chromium and 4% nickel. It delivers corrosion performance comparable to Type 304 in most media. Heat treatment conditions modify properties to a great extent. The H900 condition achieves ultimate tensile strengths of 190-200 ksi with yield strengths around 170-185 ksi and Rockwell C hardness of 40-47. The H1025 condition provides 170 ksi tensile strength while improving toughness to 35 ft-lbs Charpy impact. This makes it suitable for applications that need impact resistance. MIM-processed 17-4PH reaches densities above 7.60 g/cm³ with surface quality of Ra ≤1.6 µm in the as-sintered state.
Low-Alloy Steels for High-Strength Planetary Gear Sets
Low-alloy steels deliver exceptional hardness and structural integrity for high-load planetary gear applications. Grade 4140 in quenched and tempered conditions offers superior tensile strength, yield strength, and impact resistance compared to wrought equivalents. MIM-4605 provides exceptional strength and good ductility in as-sintered and heat-treated conditions. Grade 8620 demonstrates versatility through heat treatment. It achieves wear resistance in either quenched/tempered or case-hardened conditions.
Titanium Alloys for Lightweight Robotic Applications
Titanium alloys reduce actuator mass while maintaining strength requirements for aerospace and medical robotics. These materials weigh approximately 40-45% less than steel while delivering tensile strengths of 130-150 ksi. Ti-MIM technology produces biocompatible components for surgical instruments and implants. These meet FDA approval standards. The process achieves densities that approach theoretical values through controlled sintering atmospheres.
MIM Micro-Planetary Gearboxes in Robotic Actuator Applications

Planetary gearboxes manufactured through MIM technology serve multiple robotic actuator configurations where compact size and precision matter.
Servo Motor Reduction Gears in Industrial Robots
Industrial robotic arms employ planetary gearboxes with reduction ratios ranging from 50:1 to 160:1. These systems just need gear ratios of approximately 161:1 to achieve the torque required, with maximum speeds dropping to about 120 rpm. The compact nature of planetary designs allows direct placement at joint locations. This improves stiffness and reduces unwanted flex compared to belt-driven alternatives.
AMR and AGV Steering Wheel Actuators
Autonomous mobile robots and automated guided vehicles rely on precision planetary gearboxes for steering wheel assemblies. The mobile robots segment is forecast to become the leading industry for planetary precision gear products by 2026, with predicted compound annual growth of 55% from 2022-2026. These applications just need tight turning capabilities and zero-radius rotation through integrated servo motor systems.
Collaborative Robot Joint Actuators
Collaborative robots used planetary configurations in only 5-7% of robot joints, but adoption is increasing. These systems deliver precision with backlash less than 6 arcsec and operational lifespans exceeding 20,000 hours.
Medical Robotic Surgical Tool Actuators
Surgical robotic systems like the da Vinci platform use harmonic and planetary drive mechanisms in instrument actuators. Medical applications just need biocompatible materials and MRI compatibility for repeated surgical procedures.
Conclusion
Metal Injection Molding has become the superior manufacturing method for micro-planetary gearboxes in robotic actuators. The technology delivers complex geometries with ±0.01mm precision, material densities exceeding 98%, and surface finishes reaching Ra ≤0.2µm. MIM addresses what modern robotics just needs: compact size, high torque transmission, and affordable mass production. Robotic applications keep expanding in industrial and medical sectors, and MIM-produced planetary gearboxes will remain foundational components that drive actuator performance and reliability.
FAQs
Q1. What makes MIM technology suitable for manufacturing micro-planetary gearboxes? MIM (Metal Injection Molding) excels at creating complex geometries with internal gear features in a single manufacturing step. It achieves dimensional precision of ±0.01mm, material densities above 98%, and superior surface finishes of Ra ≤0.2µm. These characteristics make it ideal for producing the intricate, high-precision components required in micro-planetary gearboxes while maintaining cost-effectiveness for mass production.
Q2. What materials are commonly used in MIM-produced gearboxes for robotic actuators? The most common materials include stainless steel 17-4PH for corrosion-resistant applications, low-alloy steels like 4140 and 8620 for high-strength planetary gear sets, and titanium alloys for lightweight robotic applications. Each material offers specific advantages: 17-4PH provides excellent corrosion resistance with tensile strengths of 170-200 ksi, while titanium alloys reduce weight by 40-45% compared to steel while maintaining comparable strength.
Q3. Why do dynamic robots like Mini Cheetah prefer lower gear ratios in their planetary gearboxes? Lower gear ratios reduce the rotational inertia transmitted through the gears during impacts, which is critical for robots that experience collisions at every footstep. Higher gear ratios multiply the motor’s rotational inertia, putting excessive stress on gears during impacts and potentially causing breakage. Lower ratios also enable faster response times and higher power output, essential for dynamic movements like jumping and running.
Q4. What applications commonly use MIM micro-planetary gearboxes in robotics? MIM planetary gearboxes are widely used in servo motor reduction gears for industrial robots (with ratios from 50:1 to 160:1), steering wheel actuators in autonomous mobile robots (AMRs) and automated guided vehicles (AGVs), collaborative robot joint actuators requiring precision with minimal backlash, and medical robotic surgical tool actuators that demand biocompatibility and sterilization resistance.
Q5. How does the MIM manufacturing process achieve such high precision in gear production? The MIM process combines precise feedstock preparation, controlled injection molding, careful debinding, and controlled atmosphere sintering. After sintering at approximately 85% of the metal’s melting temperature, parts shrink 15-20% isotropically to achieve dimensional accuracy of IT8-IT9, which can be improved to IT6-IT7 through sizing processes. This controlled shrinkage and high material density result in the tight tolerances necessary for precision gear applications.